Rule-Based Classifier
The basic idea is to classify records using rule sets of the type "if .. then". The condition used with 'if' is called the antecedent while the predicted class of each rule is called the consequent.
A rule has the form: (condition) -> y
Building a model means identifying a set of rules
Coverage and Accuracy
We can have very accurate rules but with low coverage, which is not that relevant. Given a dataset D and a classification rule A -> y, we define:
- Coverage as the portion of records satisfying the antecedent of the rule
- Coverage = |A|/|D|
- Accuracy as the fraction that, by satisfying the antecedent, also satisfy the consequent
- Accuracy = |A ∩ y|/|A|
A set of rules R us said to be mutually exclusive if no pair of rules can be activated by the same record.
A set of rules R has exhaustive coverage if there is one rule for each combination of attribute values.
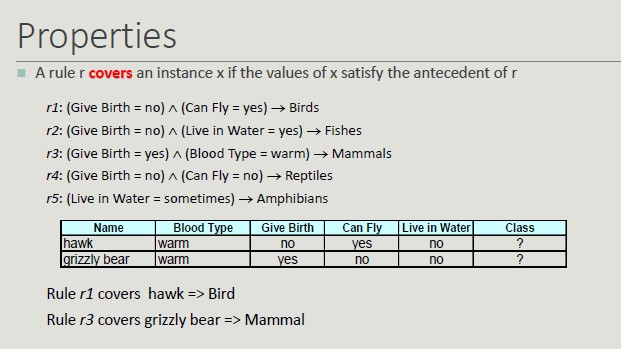
Properties
- It is not always possible to determine an exhaustive and mutually exclusive set of rules
- Lack of mutual exclusivity
- Lack of exhaustiveness
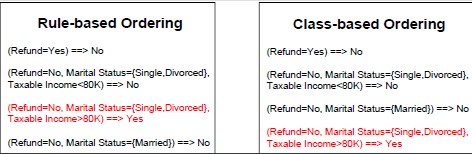
Rule Sorting Approach
- Rule-based sorting (individual rules are sort according to their quality)
- Class-based sorting (groups of rules that determine the same class appear consequently in the list)
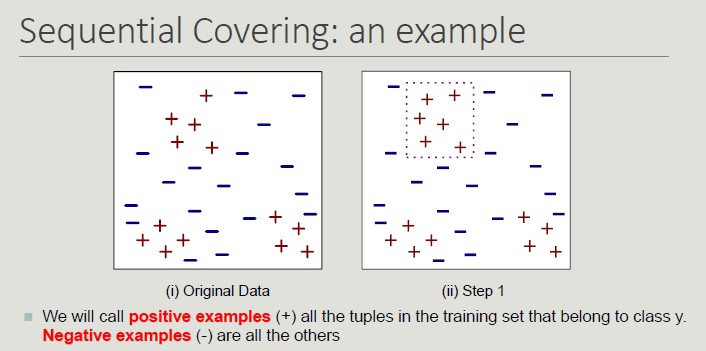
Sequential Covering
set R = Ø
for each class y ∈ Y 0 y k do
stop=FALSE;
while !stop do
r = Learn One Rule(E,A,y)
remove from E training records that are covered by r
If Quality(r,E ) < Threshold then
stop=TRUE;
else
R = R ∪ r // Add r at the bottom of the rule list
end while
end for
R = R ∪ {{} -> y k } // Add the default rule at the bottom of the rule list
PostPruning (R);
Dropping instances from Training Set
Deleting instances from the training set serves the purpose of:
- Properly classified instances: to avoid generating the same rule again and again, avoid overestimating the accuracy of the next rule
- Incorrectly classified instances: to avoid underestimating the accuracy of the next rule
Learn-One-Rule
We want something that is general (even with a lower accuracy). The goal of the algorithm is to find a rule that covers as many possible examples and as few as possible negative examples.
Rule are constructed by progressively considering a new possible predicate.
- In order to choose which predicate to add, a criterion is needed:
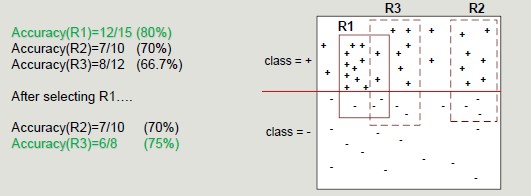
- n = number of instances covered by the rule
- nr = number of instances properly classified by the rule
- k = number of classes
Accuracy(r) = nr/n
Some metrics (like the FoilGrain) supports the rule by identifying the number of positive examples covered by the rule.
Stop Criterion: as soon as the rule is not relevant anymore, stop it.
Rule Pruning: it aims at simplifying rules to improve rule generalization error. It can be useful given that the construction approach is greedy.
example: remove the predicate whose removal results in the greatest improvement in error rate on the validation set
The RIPPER Method
It is an approach based on sequential covering for 2-class problem and it is used to choose one of the classes as a positive class and the other as a negative class.
The idea is to compute the description length (cost for transmitting the data set from one user to another) and if it exceeds the threshold, we should stop.
Created: October 4, 2022 13:57:41